What is a Raspberry Pi?
“The Raspberry Pi is a low cost, credit-card sized computer that plugs into a computer monitor or TV, and uses a standard keyboard and mouse. It is a capable little device that enables people of all ages to explore computing, and to learn how to program in languages like Scratch and Python. It’s capable of doing everything you’d expect a desktop computer to do, from browsing the internet and playing high-definition video, to making spreadsheets, word-processing, and playing games.
What’s more, the Raspberry Pi has the ability to interact with the outside world, and has been used in a wide array of digital maker projects, from music machines and parent detectors to weather stations and tweeting birdhouses with infra-red cameras.” Raspberry Pi
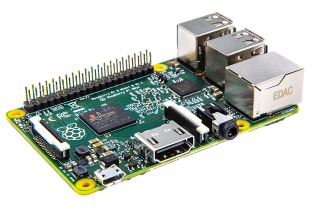
“The Raspberry Pi 2 is a bump in power and speed from the original. The newest version has the same I/O capabilities coupled with much more RAM and a dramatically faster CPU.” Information Week
You can learn all about the Raspberry Pi from: Raspberry Pi Foundation
